浩瀚的天空是无数人想要探索的领域,在天文观测中,通过收集电磁信号和重力信号(Abbott et al., 2016),我们可以了解宇宙中的物质组成和星体结构,当前的探测距离已经达到了10亿公里量级。与天空相比,人们对地下的探索则比较有限,目前人类最深的地下活动是俄罗斯在库页岛深度万米的油井。在许多时候,我们对脚下的地球内部,即使是地表以下几米的地方,都缺乏足够详细的认知。虽然目前有着重磁电震等多种地球物理探测技术,但在大多数时候,钻探仍然是了解地下微小特征的最佳方式。近年来,量子传感器作为传统地球物理传感器的一种可行的替代方案,以其突出的探测能力,正在获得越来越多的关注。
英国伯明翰大学的Stray等人研制了一种基于量子传感的超冷原子重力梯度仪,他们使用原子干涉技术,根据重力场如何影响自由下落的原子云来测量局部的重力加速度。在常规装置中,光脉冲用于产生、分离和重组物质波(每个粒子在物理学中都可以被描述为物质波),从而使它们相互作用,这样在重力仪中检测到的干涉图与局部重力场有关。基于这一原理的测量可以达到惊人的精度,但这类测量会受到噪声的严重影响。而原子重力梯度仪通过测量重力场中的梯度而不是绝对值,在一定程度上克服了这一缺陷。
自从30多年前,Kasevich 和Chu(1991)首次提出重力梯度仪的概念,这种仪器的性能随着技术的发展不断提升。当前此类研究的重点是如何让仪器便携并足够可靠,适用于野外测量(Bong et al., 2019; Wu et al., 2019)。Stray等人研发的量子传感原子重力梯度仪是这一研究领域的重大突破。他们设计了一种沙漏结构,对垂直间隔一米的两个超冷铷原子云进行了差分测量。这种配置提供了坚固紧凑的光学元件,可以在几个月内保证测量精度。
该仪器仅通过测量地下空洞引起的微小重力变化,就能够无损地探测到空洞的分布位置。对于10分钟以上的测量,该仪器的灵敏度可达到20E(1E为10-9 / s2)。这种传感器使原子梯度计朝着实际应用的方向迈出了一大步。原子重力仪和梯度仪具有天然的长期稳定性,在倾斜和地面振动等环境效应下仍然能够保证测量灵敏度,而且不需要机械部件,因此相比于传统的重力仪,它们具有明显的优势。Stray等人的结果表明,这类仪器将有望很快实现小型化和便携化,更容易在野外测量中得到应用。
Stray等人的定量测量表明,使用他们的仪器进行测量的不确定度优于目前的商用重力仪。更重要的是,他们指出这种仪器在15分钟内就可以收集到10个数据点。从这个角度来看,该团队的研究成果有望极大地改变应用重力测量学的研究现状。
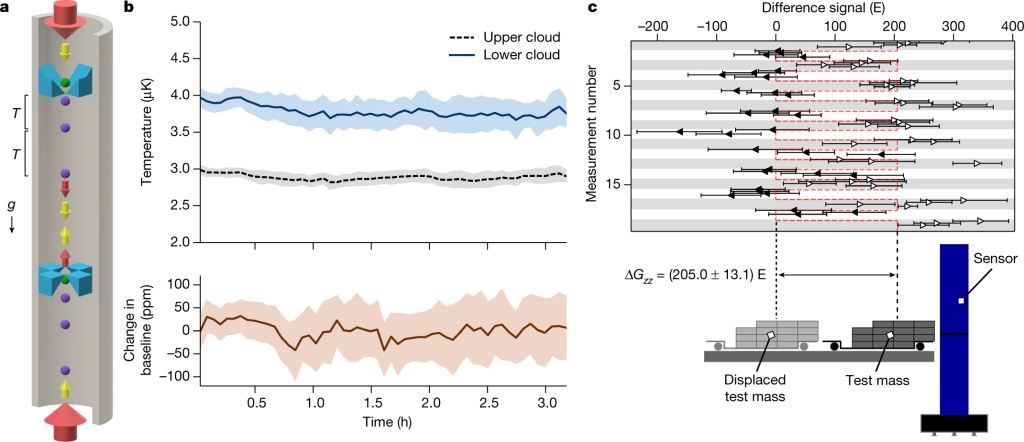
图1 重力梯度仪(Stray et al., 2022)。(a)沙漏型重力梯度仪,它使用两个反向定向单光束 MOT,通过多个镜面组件(蓝色)实现梯度测量。初始原子云(绿色)受局部重力加速度g作用下落,在受到相隔时间 T 的光脉冲作用后发生原子干涉(紫色),这里的光束传输用箭头表示。冷却光束(红色)被真空镜(蓝色)偏转以提供全方位冷却,每个输入光束的一部分通过反射镜面组件偏转之后为对面的 MOT 提供冷却光束。原子干涉仪光束(黄色箭头)具有较小的光束能量聚焦半径,因此它们可以通过镜面组件的孔径并且不会有明显的能量削弱。这里的每个干涉仪能够同时操作,垂直基线间隔为1 m;(b)来自每个捕获区域的原子云温度随时间变化曲线(上图)以及1 m原子云分离基线随时间的相对变化曲线(下图)(通过50次测量获得的平均值,每次测量4秒,阴影区域为不确定性范围);(c)测试质量块在两个位置之间移动引起的重力梯度变化——靠近传感器(空心三角点)或远离传感器(实心三角点)。每个测量数字代表一个特定的测试位置质量。每个数据点由八个重力梯度的平均值加权得到测量值,每次测量都包含来自原子干涉仪的25次观测,干涉仪每次测量耗时1.5 s。每个数据点的误差范围是八个重力梯度读数的标准误差。测试质量块大约每20分钟移动一次,误差为±3.5分钟,其位置可重复性为1厘米,变化的模型所预测的重力梯度信号ΔGzz以红色显示
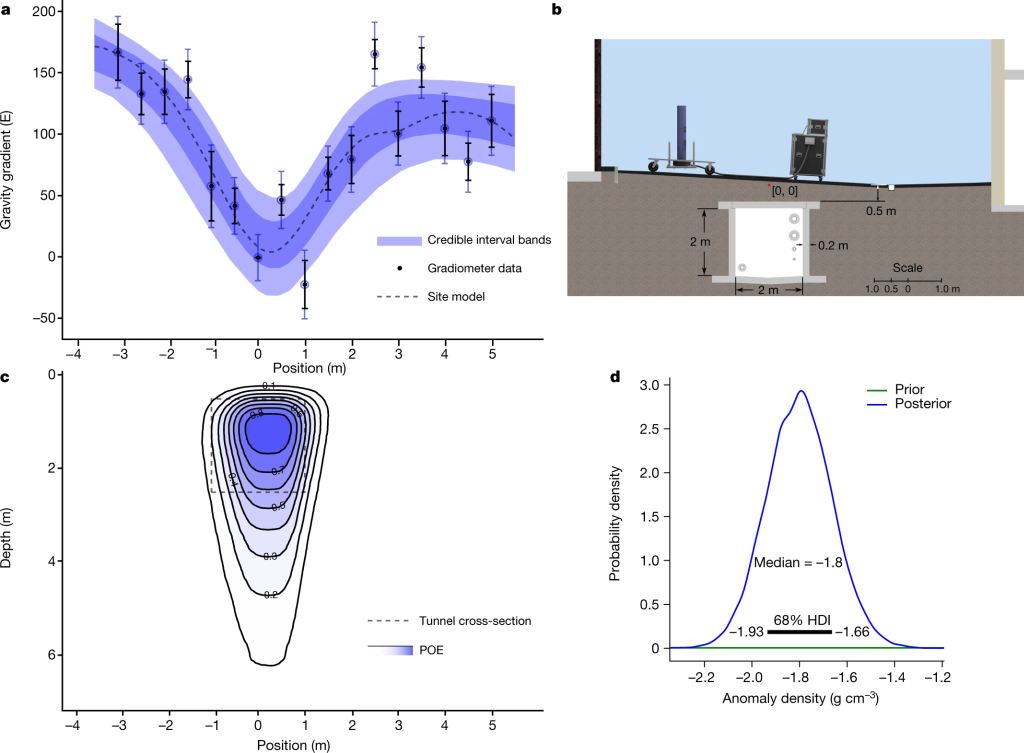
图2 重力梯度测量结果(Stray et al., 2022)。(a)重力梯度数据的标准误差分布(黑色散点图)和包括模型不确定性时的总测量不确定性(蓝色散点图)、1倍标准差(深蓝色阴影)和2倍标准差(浅蓝色阴影)的可信范围和测点准确值(虚线);(b)场地比例示意图,坐标原点(红色圆点)在垂直方向上的位置由测量线上的最低点决定,在水平方向上的位置由隧道中心预期位置决定;(c)重力梯度仪数据推断的隧道位置(蓝色等高线)和准确的隧道位置(虚线);(d)通过重力梯度数据和先验信息得到的土壤密度分布
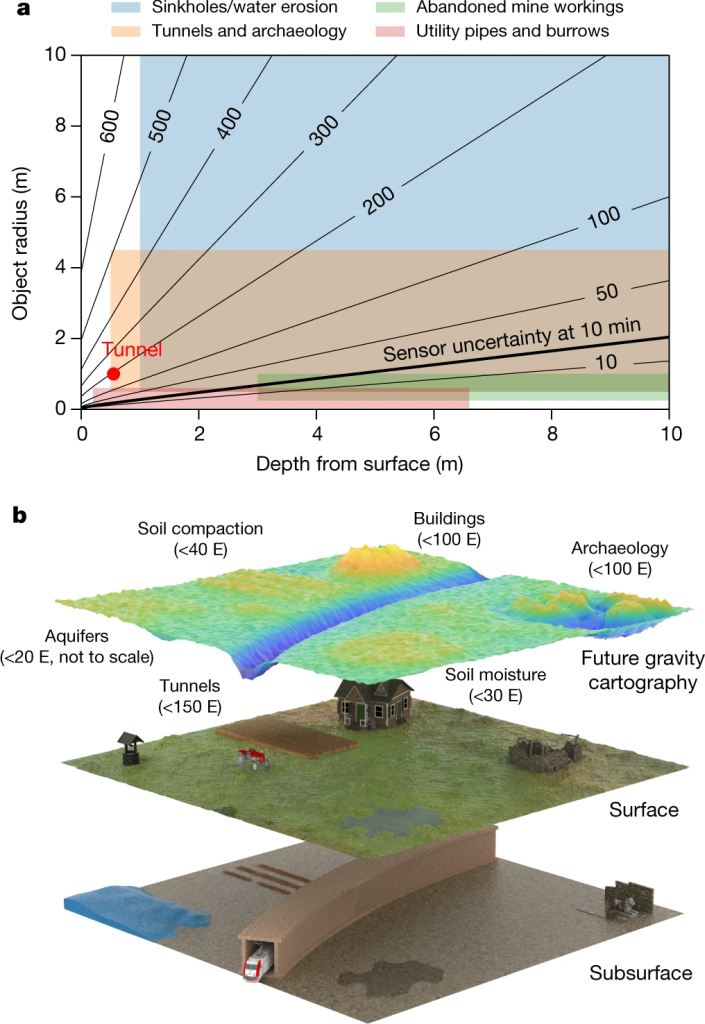
图3 (a)典型重力梯度的等高线图及其各种应用场景中的信号大小,检测到的特征参数和传感器的不确定性变化对应关系;(b)未来通过该仪器可获得某区域 0.5 m 空间分辨率的重力分布图,测量精度可达20 E(Stray et al., 2022)
主要参考文献
Stray B, Lamb A, Kaushik A, et al. Quantum sensing for gravity cartography[J]. Nature, 2022, 602(7898): 590-594. (原文链接)
Abbott B P, Abbott R, Abbott T D, et al. Observation of gravitational waves from a binary black hole merger[J]. Physical Review Letters, 2016, 116(6): 061102.
Kasevich M, Chu S. Atomic interferometry using stimulated Raman transitions[J]. Physical Review Letters, 1991, 67(2): 181.
Bongs K, Holynski M, Vovrosh J, et al. Taking atom interferometric quantum sensors from the laboratory to real-world applications[J]. Nature Reviews Physics, 2019, 1(12): 731-739.
Wu X, Pagel Z, Malek B S, et al. Gravity surveys using a mobile atom interferometer[J]. Science Advances, 2019, 5(9): eaax0800.
(撰稿: 郑忆康,徐亚,王一博/油气室)